
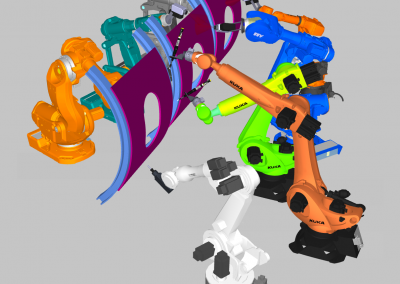
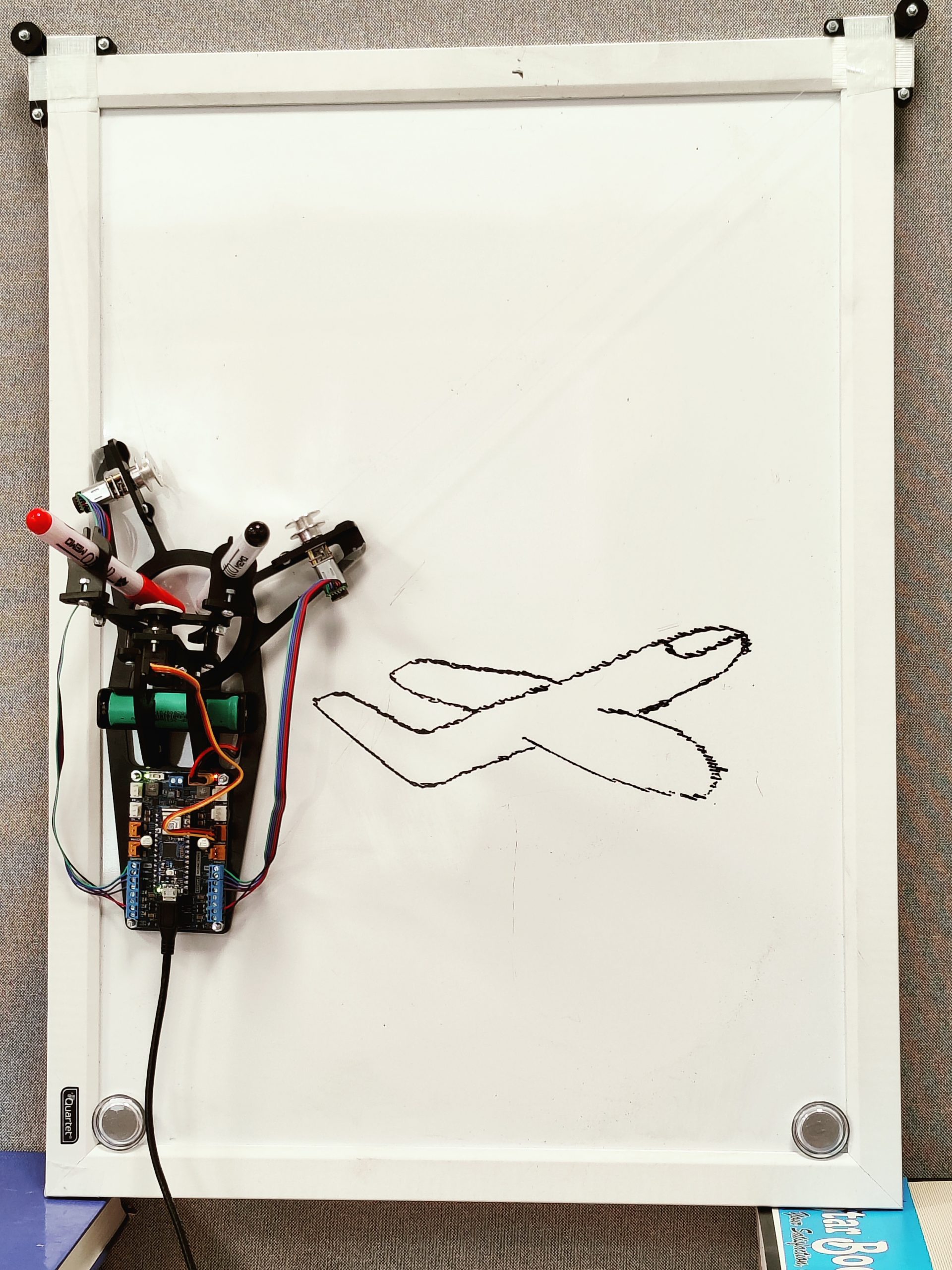
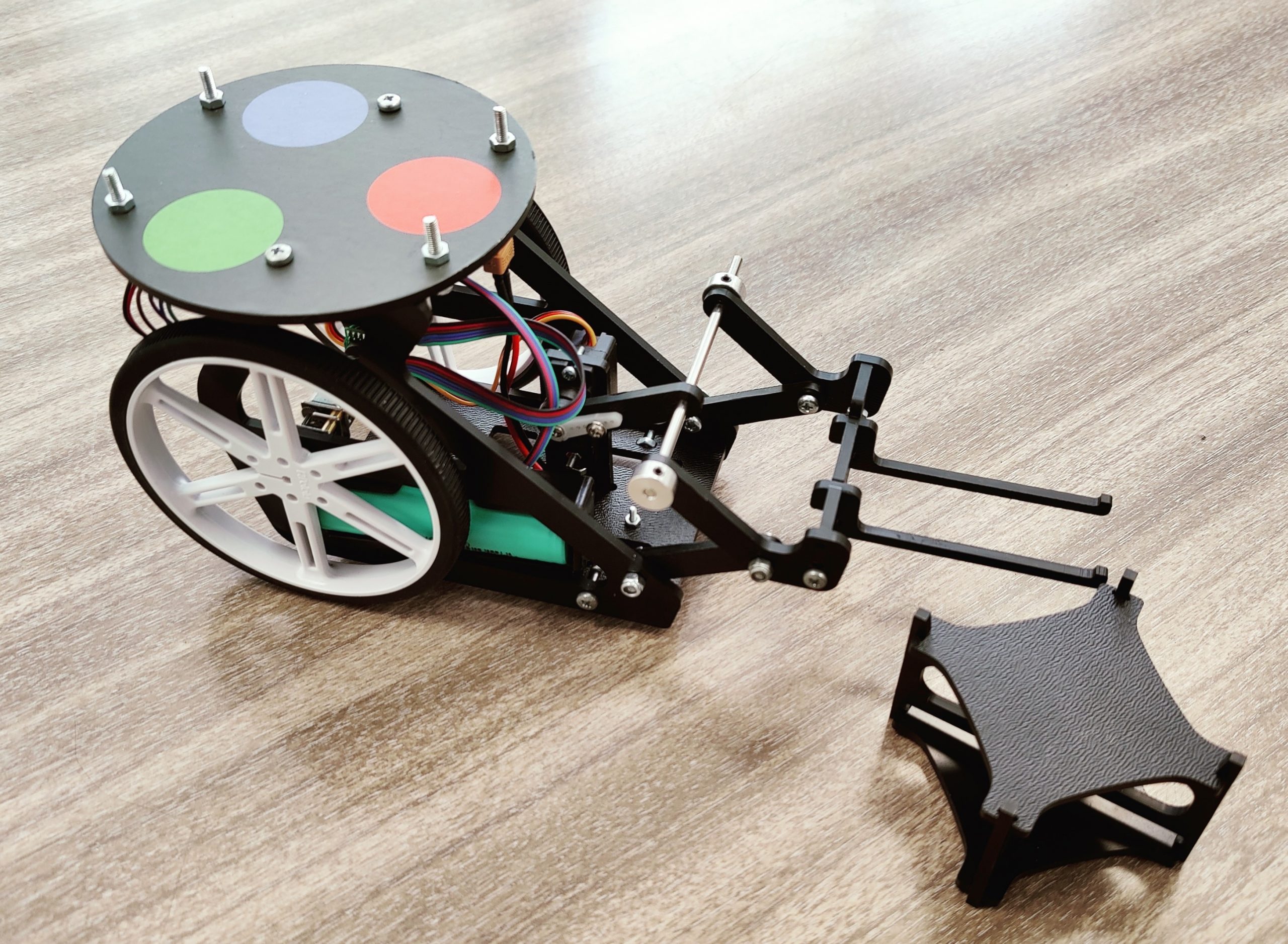
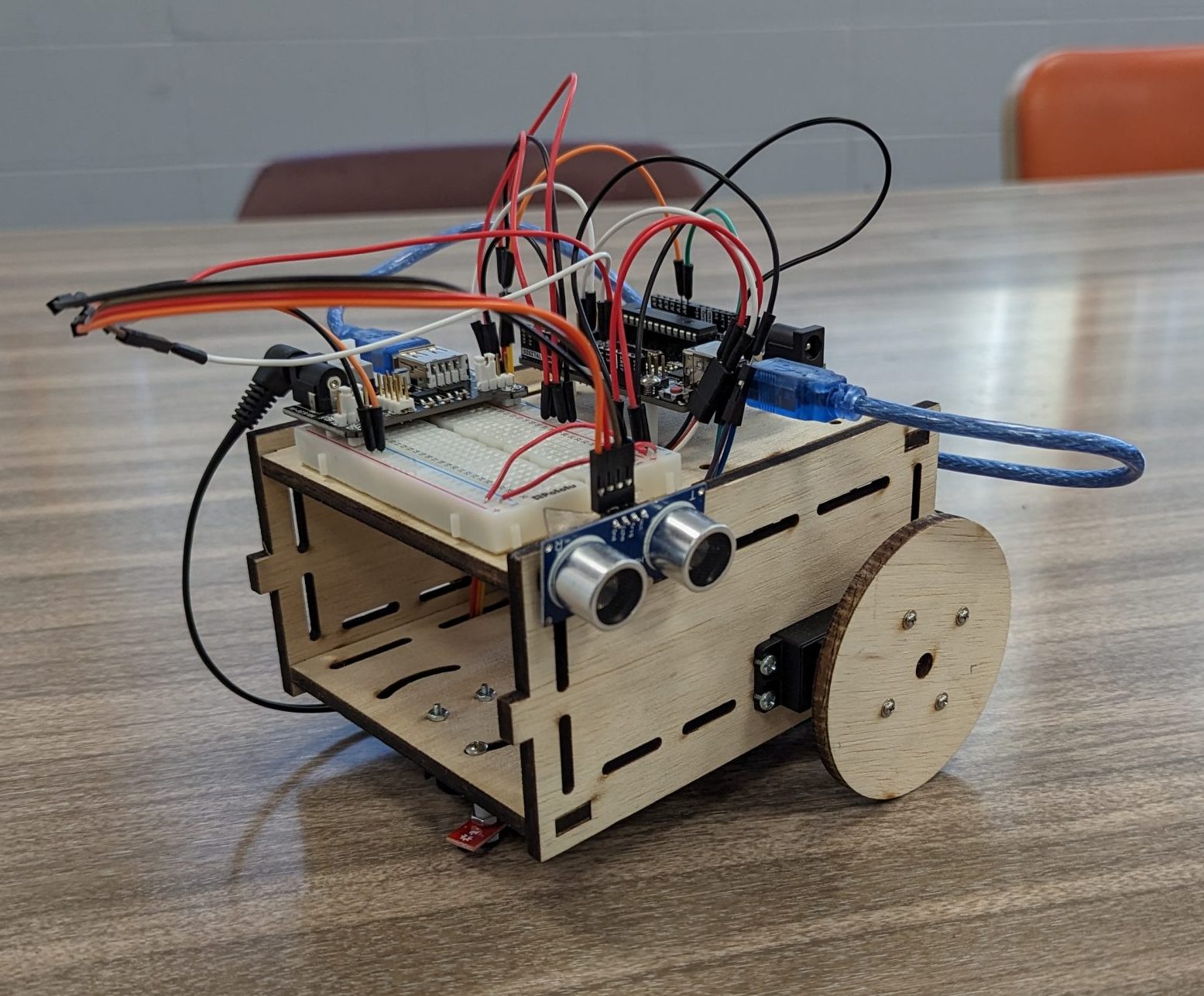
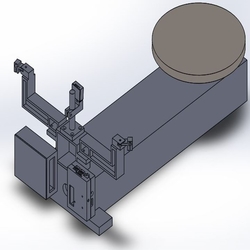
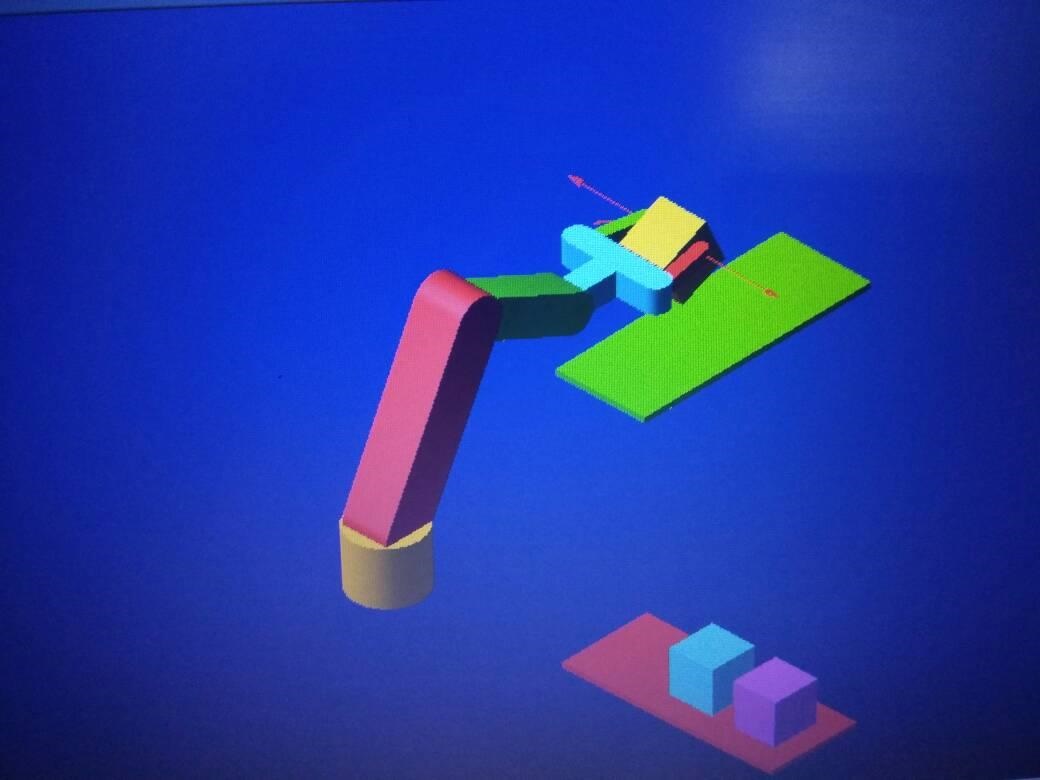
4 DOF Robotic Arm mounted on a Mobile Base

Built a remote-controlled manipulator on a differential drive base, capable of obstacle avoidance using onboard sensors and precise motion using feedback control.
Skills Utilized: MATLAB, CAD (SOLIDWORKS), Kinematics, Analysis, Actuators, Microcontrollers, C++ Programming, Path Planning, Robotics,Inverse Kinematics, Forward Kinematics, Sensors & Actuators

![[Award winning design] $50 toilet to curb diarrhea in Pakistan](https://www.zainullah.com/wp-content/uploads/2020/12/Toiled-Design.png)
Thank you for being here.
You can always reach out to me via email for any opportunities or just to say 'hi'. If you want to convince others that I will add great value to your organization, you can download and send my resume to them.