
Design of Novel P-drivable 1DOF mechanisms

This research was presented at ASME’s IDETC 2023 Conference where it was awarded the A.T.Yang Memorial Award- given to the best paper on theoretical kinematics out of 200+ papers. The paper has also been invited to be published in a special issue ASME’s Journal of Mechanism & Robotics.
Objective:
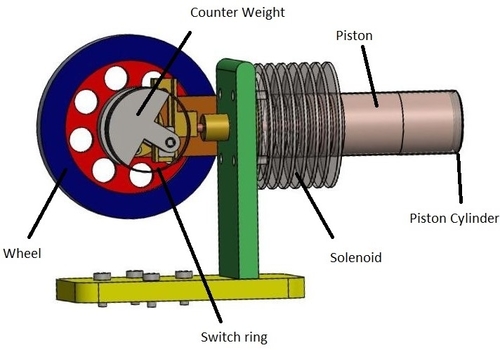
Actuating a single DOF mechanism via a separate P-drivable spherical–prismatic–spherical (SPS) chain that avoids singularities encountered by actuating the mechanism at one of its original joints.
Key Features:
- Does not alter the path of the mechanism.
- Process of producing singularity free spatial mechanisms to be broken into two steps:
(a) Kinematic synthesis- finding circuit-defect-free solutions capable of producing the desired motion
(b) Synthesizing this additional chain for actuation




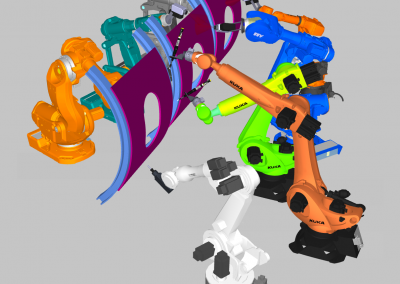
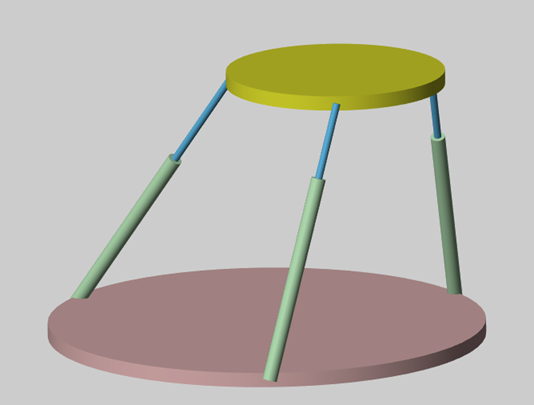
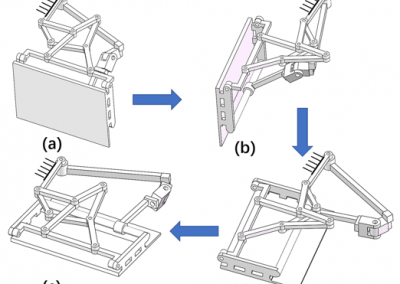
Example# 1: Upward Spiraling Motion


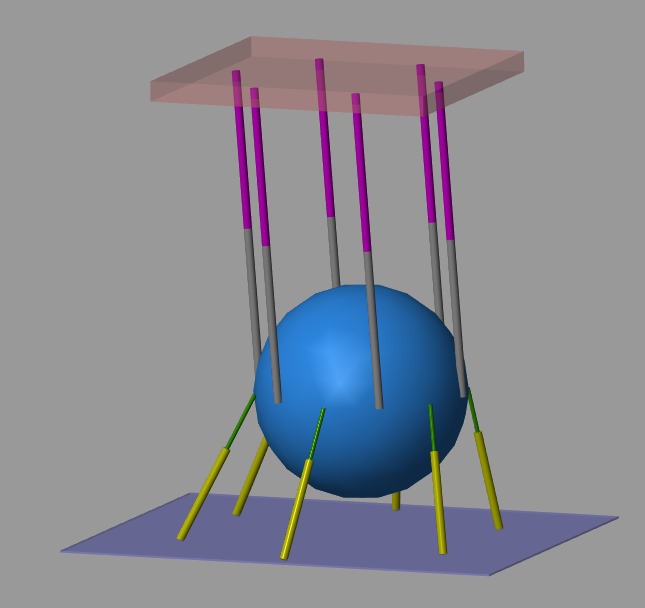
Example# 2: A more complex motion


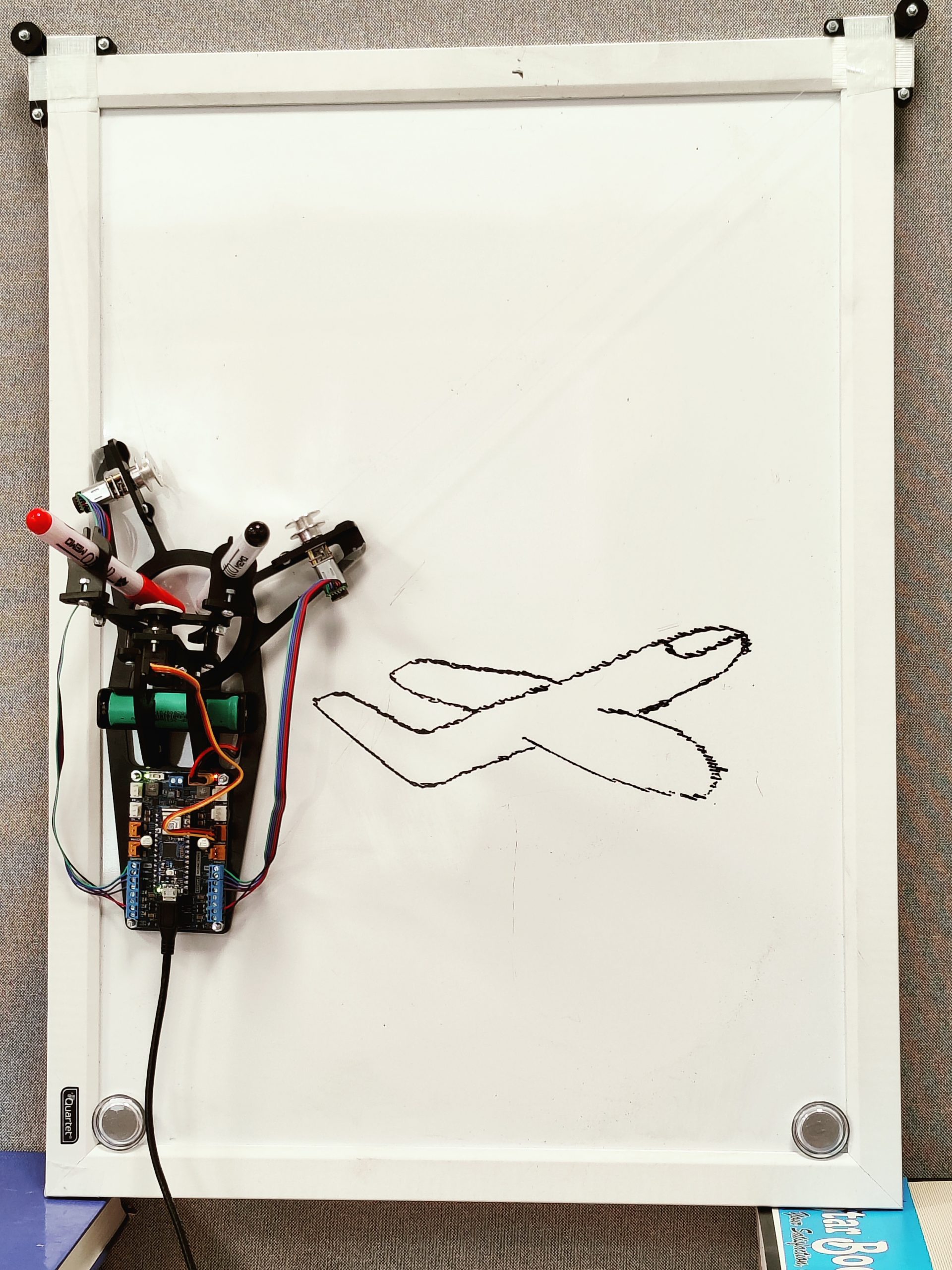
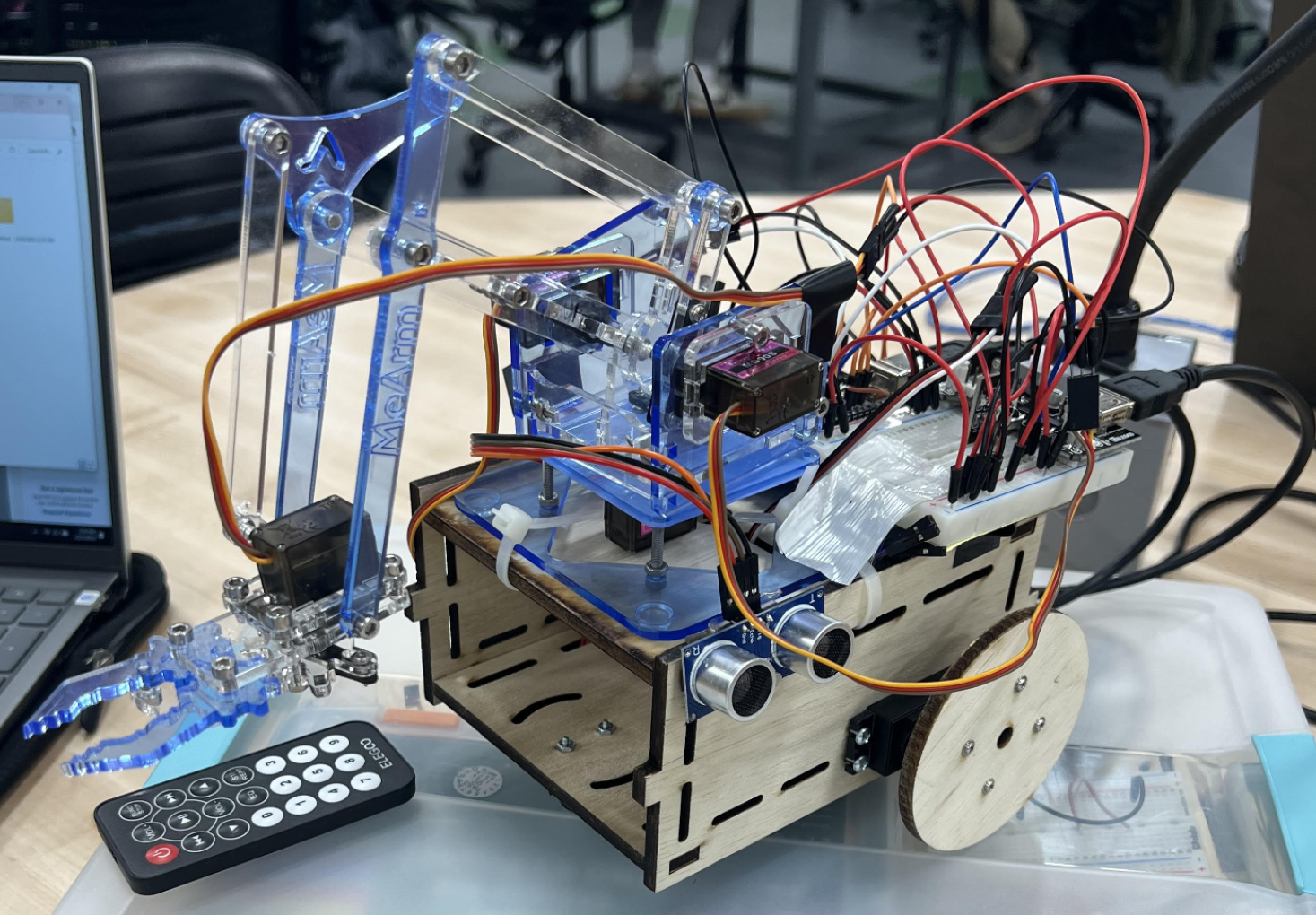
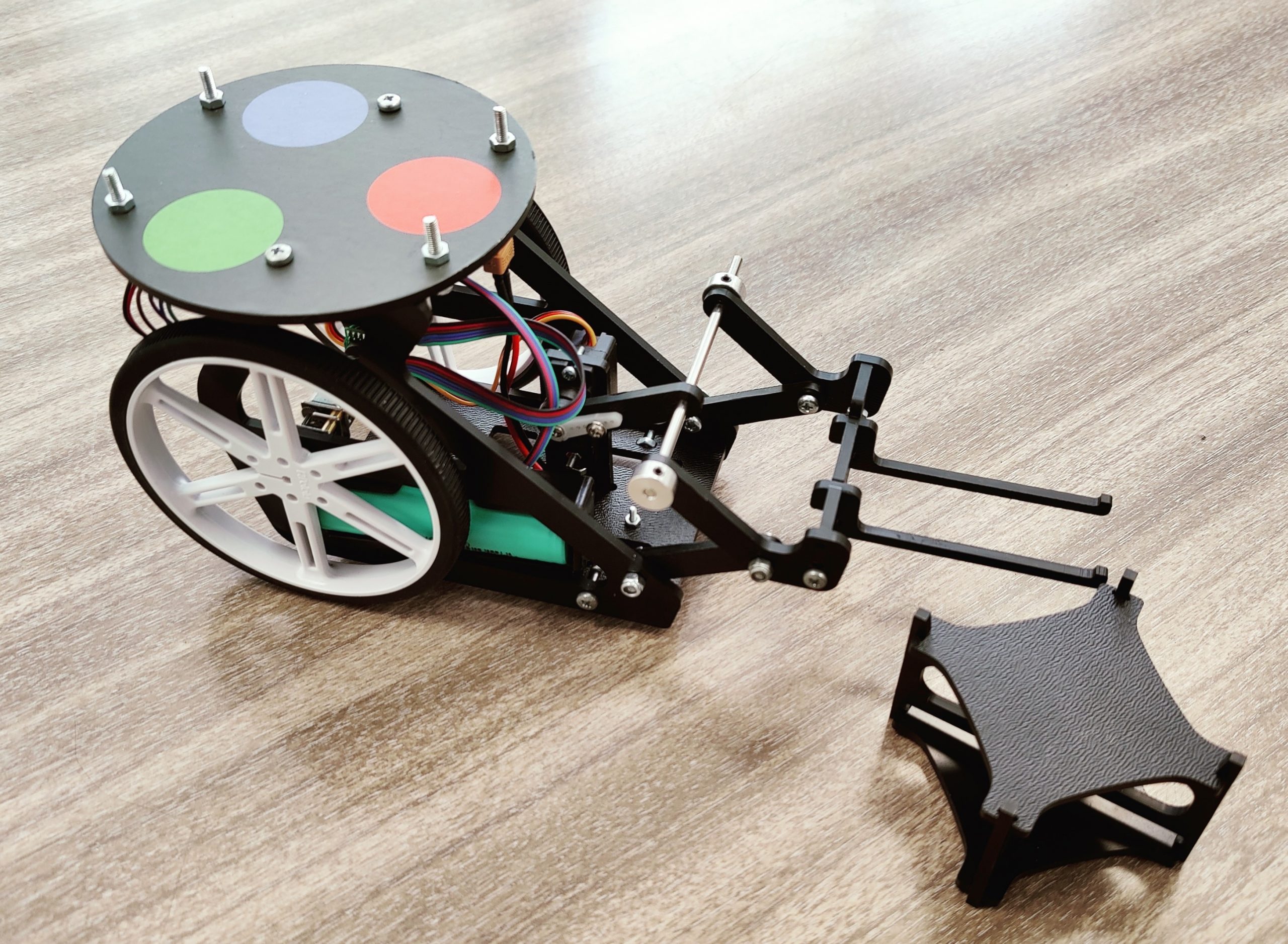
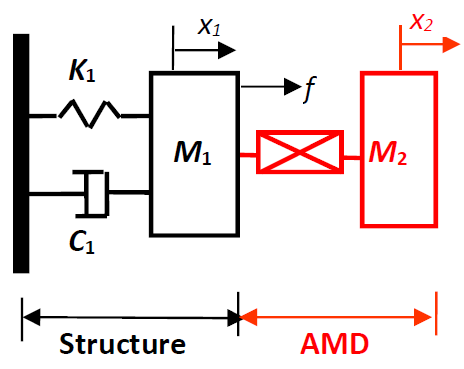
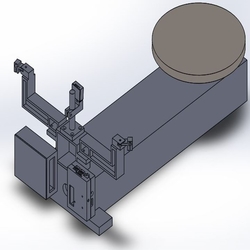
Example# 3: Wheel Rotating Without Slipping [Planar Example]






This was a rather quick overview of the research. I did not put in a lot of equations or anything to not make it look too complex. If you are interested in learning more about this research, drop me an email and I can send you the full research paper.

![[Award winning design] $50 toilet to curb diarrhea in Pakistan](https://www.zainullah.com/wp-content/uploads/2020/12/Toiled-Design.png)
Thank you for being here.
You can always reach out to me via email for any opportunities or just to say 'hi'. If you want to convince others that I will add great value to your organization, you can download and send my resume to them.