
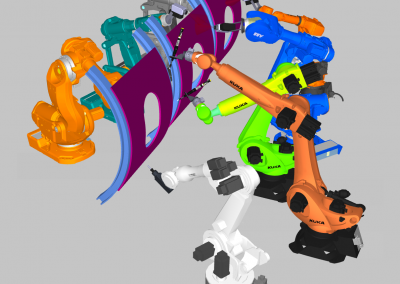
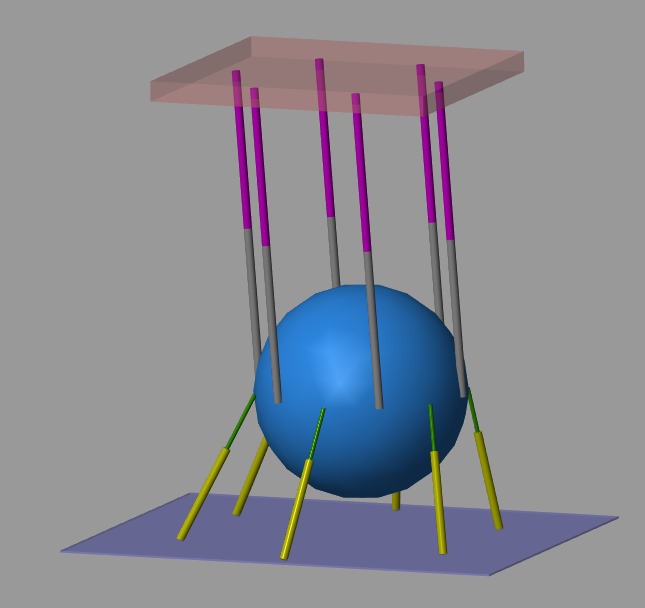
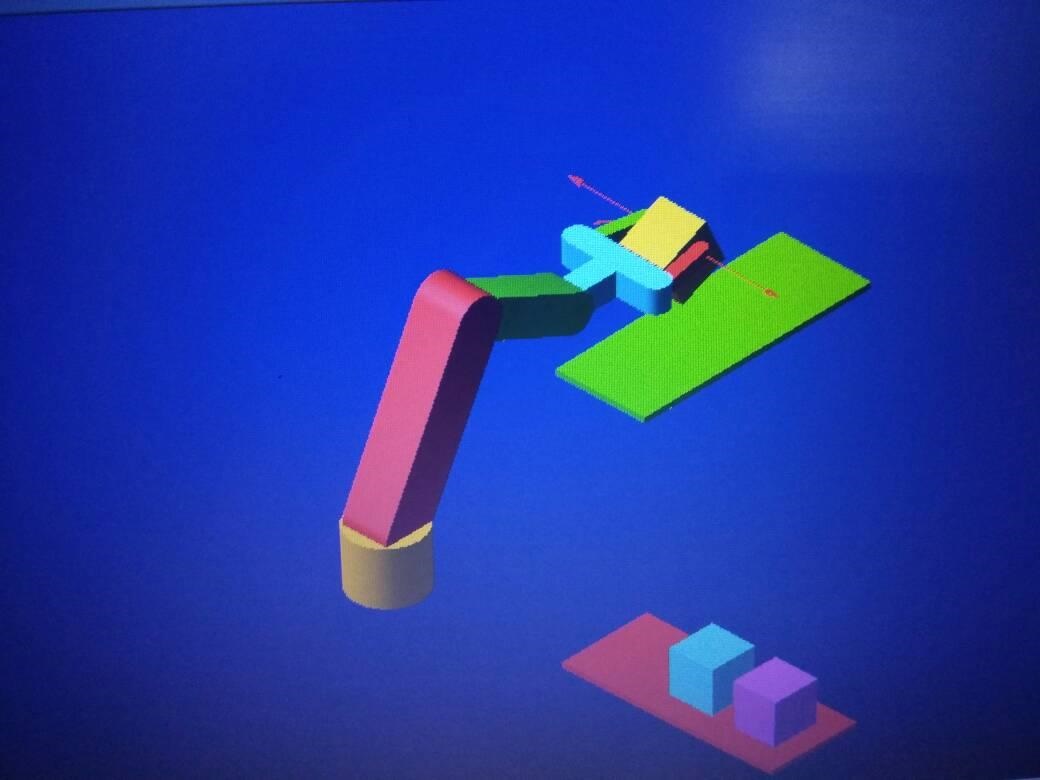
Stewart Platform -Design, Analysis, Modeling and Simulation

Developed equations to calculate the system parameters (leg lengths), followed by performing inverse kinematics to make the platform move in the desired motion. The code was written in MATLAB. The Stewart platform was modeled and simulated in Simscape (toolbox of MATLAB). It was actuated using both joint motion (kinematic actuation) and force (dynamic) actuation, via feedback control using PID controller.
Skills Utilized: MATLAB, Simulink, Simscape, CAD (SOLIDWORKS), Kinematics, Dynamics, Analysis, Modeling, Simulation

![[Award winning design] $50 toilet to curb diarrhea in Pakistan](https://www.zainullah.com/wp-content/uploads/2020/12/Toiled-Design.png)
Thank you for being here.
You can always reach out to me via email for any opportunities or just to say 'hi'. If you want to convince others that I will add great value to your organization, you can download and send my resume to them.