
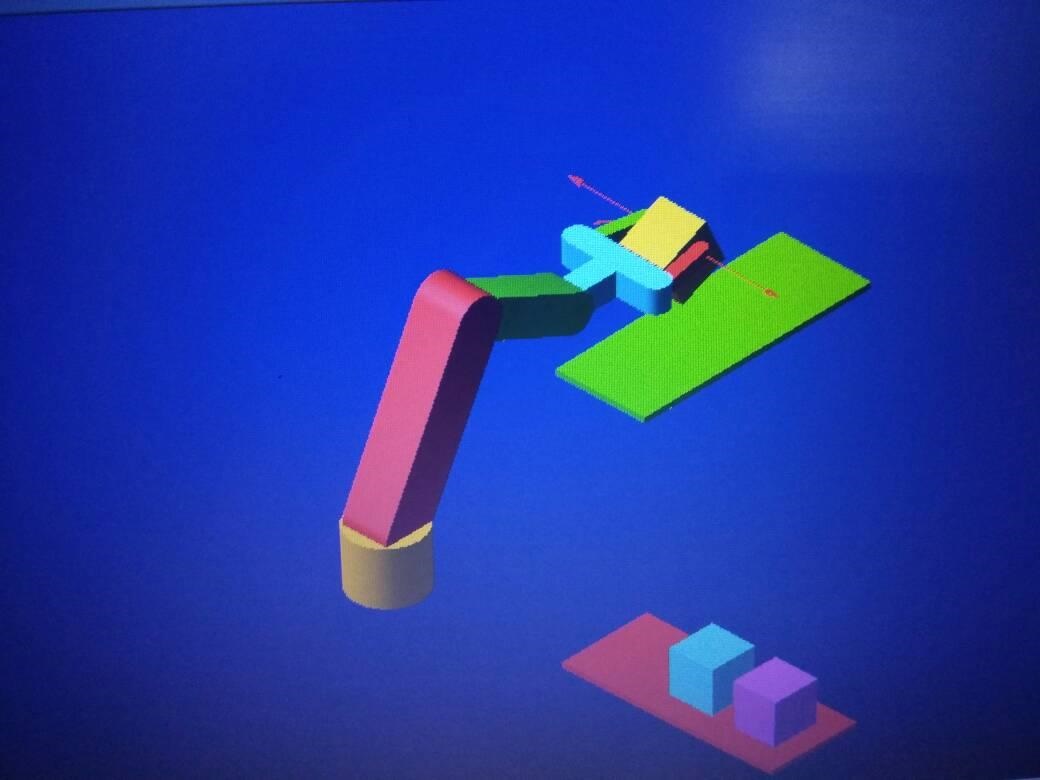
Webcam controlled Rover

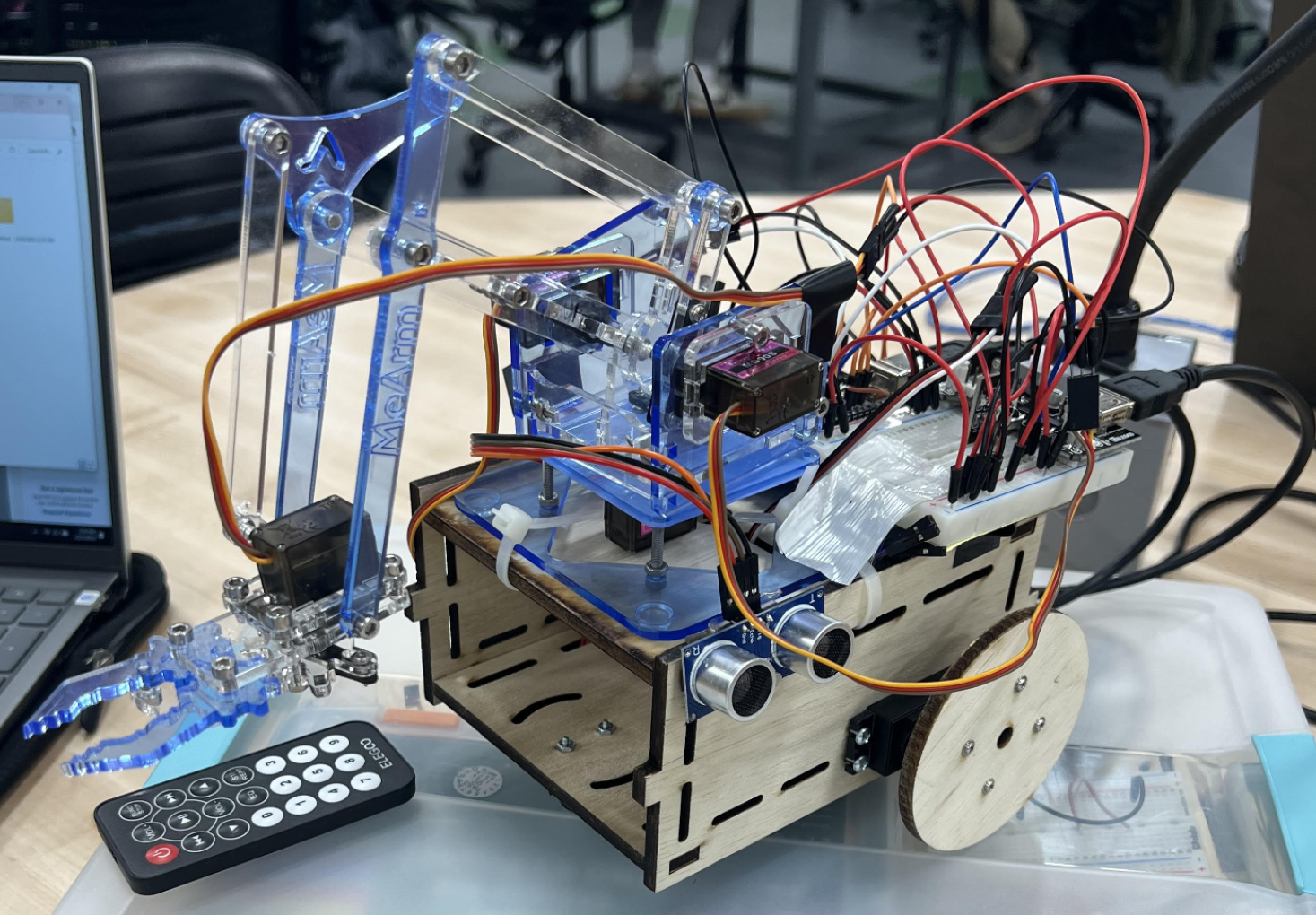
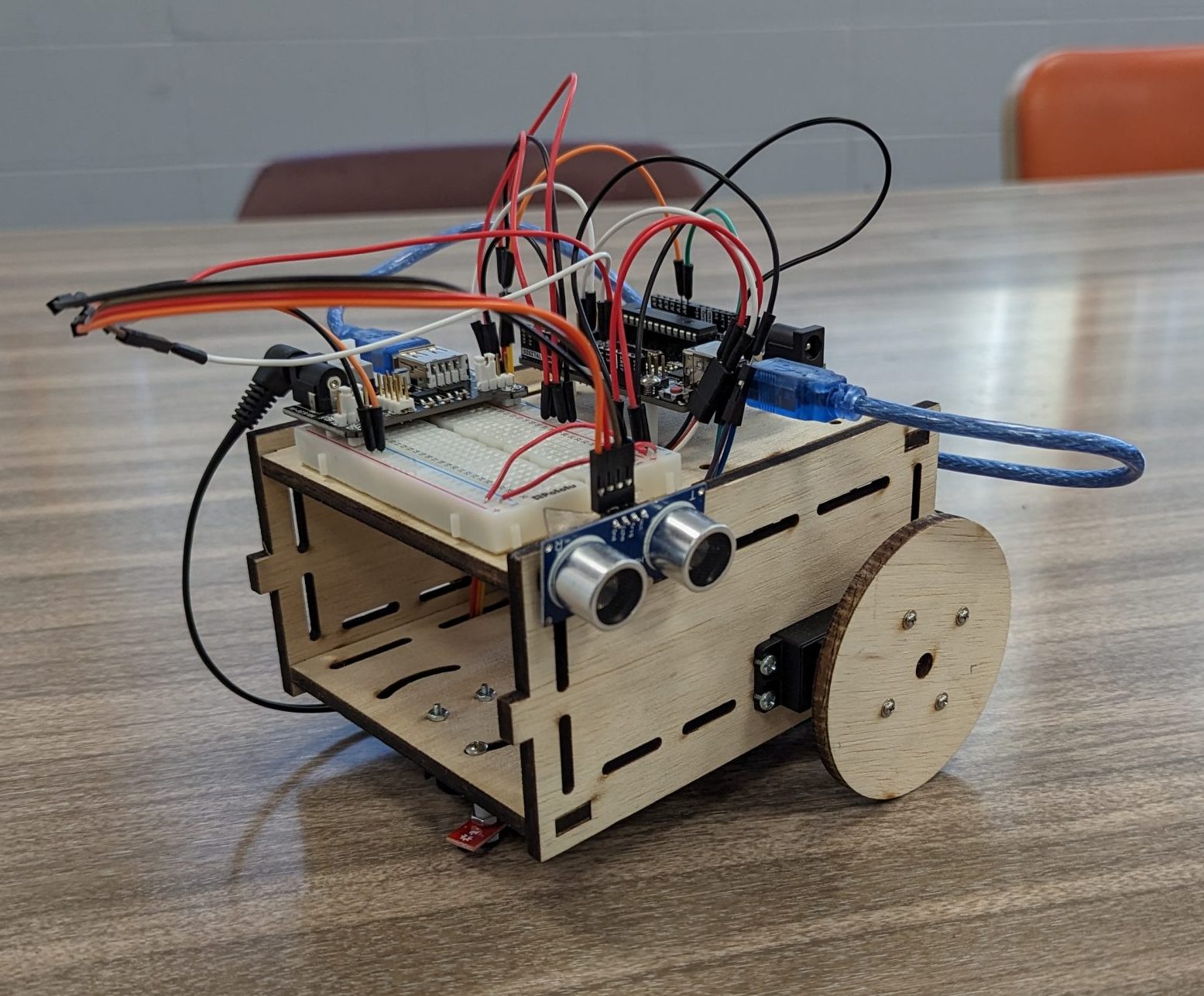
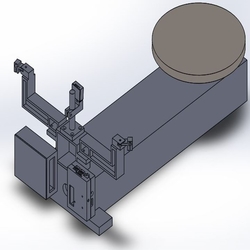
The differential drive rover uses the input from a webcam and processes it to navigate through an arena. It also incorporates a forklift powered by a servo motor for manipulating objects. It is controlled using an Arduino Nano microcontroller and programmed using Simulink and the Stateflow control logic tool in MATLAB.
Skills Utilized: MATLAB, CAD (SOLIDWORKS), Kinematics, Analysis, Actuators, Microcontrollers, C++ Programming, Image Processing, Noise Filtering, Object Avoidance, Path Planning

![[Award winning design] $50 toilet to curb diarrhea in Pakistan](https://www.zainullah.com/wp-content/uploads/2020/12/Toiled-Design.png)
Thank you for being here.
You can always reach out to me via email for any opportunities or just to say 'hi'. If you want to convince others that I will add great value to your organization, you can download and send my resume to them.